
Coaching robots to carry out varied manipulation behaviors has been made potential by imitation studying from human demonstrations. One fashionable methodology includes having human operators teleoperate with robotic arms via varied management interfaces, producing a number of demonstrations of robots performing totally different manipulation duties, after which utilizing the information to coach the robots to carry out these duties independently. Newer efforts have tried to scale this paradigm by gathering extra information with a bigger group of human operators over a wider vary of capabilities. These works have demonstrated that imitation studying on giant, various datasets can yield spectacular efficiency, permitting robots to generalize towards new objects and unseen duties.
This suggests that gathering substantial and wealthy datasets is an important first step in creating broadly proficient robots. However this achievement is barely potential with costly and time-consuming human work. Take a look at a robotic mimic case research the place the agent’s job is to maneuver a coke can from one bin to a different. Though there is only one scene, one merchandise, and one robotic on this simple job, a large dataset of 200 demos was wanted to realize a good success charge of 73.3%. Bigger datasets, together with tens of 1000’s of demos, have been required for current makes an attempt to broaden to settings with varied sceneries and objects. As an illustration, it reveals that challenges with minor modifications in objects and objectives could also be generalized utilizing a dataset of over 20,000 trajectories.
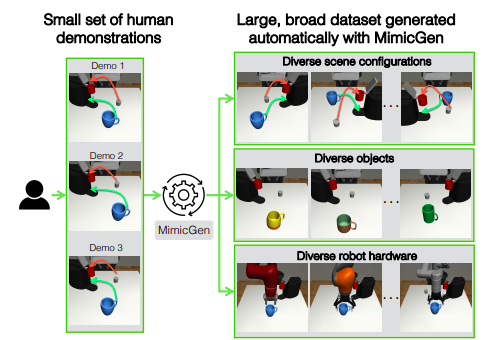
Determine 1: Researchers present a knowledge manufacturing system that, by repurposing human demonstrations to make them helpful in new contexts, can generate huge, diversified datasets from a small variety of human demos. They use MimicGen to offer information for quite a lot of objects, robotic gear, and scene setups.
A number of human operators, months, kitchens, and robotic arms are all concerned within the roughly 1.5-year data-collecting effort from RT-1 to create guidelines that may efficiently rearrange, clear, and get well issues in a number of kitchens with a 97% success charge. Nonetheless, the variety of years required to assemble sufficient information to implement such a system in real-world kitchens nonetheless must be found. They ask, “To what extent does this information comprise distinct manipulation behaviors?” These datasets might embody comparable alteration methods utilized in varied settings or circumstances. When greedy a cup, as an example, human operators might exhibit very comparable robotic trajectories unbiased of the mug’s placement on a countertop.
Adapting these trajectories to numerous conditions can assist produce quite a lot of. Though promising, the appliance of those approaches is proscribed because of their assumptions concerning sure duties and algorithms. Reasonably, they need to create a common system that may be simply included in present imitation studying processes and improve varied actions’ efficiency. On this analysis, they provide a novel data-gathering approach that mechanically generates huge datasets throughout many eventualities utilizing a small number of human examples. Their approach, MimicGen, splits up a restricted variety of human demonstrations into items targeted on objects.
It then chooses one of many human demonstrations, spatially alters every object-centric half, stitches them collectively, and directs the robotic to comply with this new route to assemble a current demonstration in a brand new situation with different object postures. Regardless of being simple, they found that this system is kind of good at producing sizable datasets from varied eventualities. The datasets could also be used to mimic studying to coach competent brokers.
Their contributions embody the next:
• Researchers from NVIDIA and UT Austin current MimicGen, a expertise that makes use of new scenario adaptation to create huge, diversified datasets from a restricted variety of human demos.
• They present that MimicGen can present high-quality information throughout varied scene configurations, object cases, and robotic arms—all of which aren’t included within the authentic demos—to coach expert brokers via imitation studying (see Fig. 1). Decide-and-place, insertion, and interfacing with articulated objects are only a few examples of the numerous long-horizon and high-precision actions that MimicGen is extensively suited to and that decision for distinct manipulation talents. Utilizing solely 200 supply human demos, they produced 50K+ further demonstrations for 18 jobs spanning two simulators and an actual robotic arm.
• Their methodology performs comparably to the choice of gathering extra human demonstrations; this raises important considerations about when it’s essential to request further information from a human. Utilizing MimicGen to generate an equal quantity of artificial information (e.g., 200 demos generated from 10 human vs. 200 human demos) leads to comparable agent efficiency.
Try the Paper and Venture. All credit score for this analysis goes to the researchers of this challenge. Additionally, don’t neglect to affix our 32k+ ML SubReddit, 41k+ Fb Neighborhood, Discord Channel, and Electronic mail Publicationthe place we share the newest AI analysis information, cool AI tasks, and extra.
For those who like our work, you’ll love our publication..
We’re additionally on Telegram and WhatsApp.
![]()
Aneesh Tickoo is a consulting intern at MarktechPost. He’s presently pursuing his undergraduate diploma in Knowledge Science and Synthetic Intelligence from the Indian Institute of Know-how(IIT), Bhilai. He spends most of his time engaged on tasks aimed toward harnessing the facility of machine studying. His analysis curiosity is picture processing and is captivated with constructing options round it. He loves to attach with folks and collaborate on attention-grabbing tasks.
🔥 Meet Retouch4me: A Household of Synthetic Intelligence-Powered Plug-Ins for Pictures Retouching